The Sapir–Whorf hypothesis and claims about languages influencing thought are old and widely regarded as falsified. And I think it’s true that the strong version is false, but the weak version about language (and some aspects of culture, which is hard to disentangle from language) influencing thought has some support. And a particularly interesting area which language and culture can influence is spatial thinking and reasoning, as explored by Stephen Levinson in at least three books: Space in Language and Cognition, Grammars of Space, and Demonstratives in Cross-Linguistic Perspective, the first of which I bought from Foyles in London back in 2006.

In Space in Language and Cognition, Levinson describes three main projective (as opposed to topological) frames of reference used in human languages to describe the static location of objects. These are:
- Intrinsic
- Relative
- Absolute
In all three types of frame, the location of the object (the figure) is described using basis vectors / directional offsets from a reference point or origin (the ground). For example, if the salt is to the left of the pepper, then the salt is the figure, the pepper is the ground, and the direction is left. The difference between the three is in how that basis is created.
Absolutive Frames
The difference between these system is how the basis vectors / directions are created and labelled. The easiest to describe is the absolute system, which does not depend on either the orientation of the speaker or the features of the ground. In an absolute system, the basis vectors are stable: north, south, east and west are examples in English, although we rarely use them in casual speech to specify the locations of objects. This is not true of all languages and cultures though. Some, including some indigenous Australian languages like Guugu Yimithirr, use absolute directions much more than an English speaker would. The following example is given of a speaker describing one of the standard images used in the study:
Bula gabiirr gabiirr nyulu nubuun yindu buthiil naga nyulu yindu buthiil jibaarr yugu gaarbaarr yuulili buthiil jibaarr nyulu baajiiljil
(There are) two girls, the one (has) face to the east, the other (has) face to the south, a tree stands in between, she’s crying nose to the south
It’s hard to imagine an English speaker picking this as the natural description for a scene when shown a picture of it.
In languages where the absolutive frame of reference is heavily used, the basis vectors often relate to local geography. While Guugu Yimithirr has four approximately aligned with the compass directions, this is not a rule: Tzeltal, a Mayan language spoken in highland Chiapas, Mexico, has “uphill” (roughly south), “downhill” (roughly north) and “across” (either east or west). Other systems are based on geographic features such as the orientation of nearby rivers or drainage basins.
And of course all languages adopt an absolute system in the vertical direction, since gravity is important and humans have a sense of balance of necessity. Every language has terms like “above” and “below” as part of the toolbox for specifying location, whatever system they use on the horizontal plane.
Intrinsic Frames
The next most complicated in the intrinsic frame of reference. In the intrinsic system, the vectors are projections from inherent features of the ground. For example, in the following picture the ball is “in front of” the car: the car has an inherent front (the side facing its typical direction of travel) according to the rules of the English language and culture. If something is “in front of” the car in the intrinsic sense, then you can find it by following a line projected outwards from the front of the car.
Intrinsic frames are simple and universal but they have a few problems. The first is that intrinsic frames are not transitive, because each ground object has its own coordinate system. In the absolute frame, if A is north of B and B is north of C, then A is north of C. But with intrinsic frames you end up with situations like this:

The ball is in front of car B, and car B is in front of car B. Is the ball in front of car A? No, it is not. And you can’t know where it is without knowing the exact orientation of all the objects used as grounds / reference points.
The second, even bigger, problem is the complexity of assigning sufficient named directions to any ground object: the car might have an inherent “front” and “back”, but does the ball? Does a tree? Any object with too many symmetries has this problem.
Relative Frame
The relative frame solves some of these problems by projecting a coordinate system based on the speaker’s orientation onto other ground objects. Speakers are human and thus have available forwards, backwards, left and right directions. These viewpoint-dependent directions can be extended to other ground objects by translation, rotation or reflection. In English the speaker’s coordinate system is reflected, so left and right are preserved but front and back are swapped:
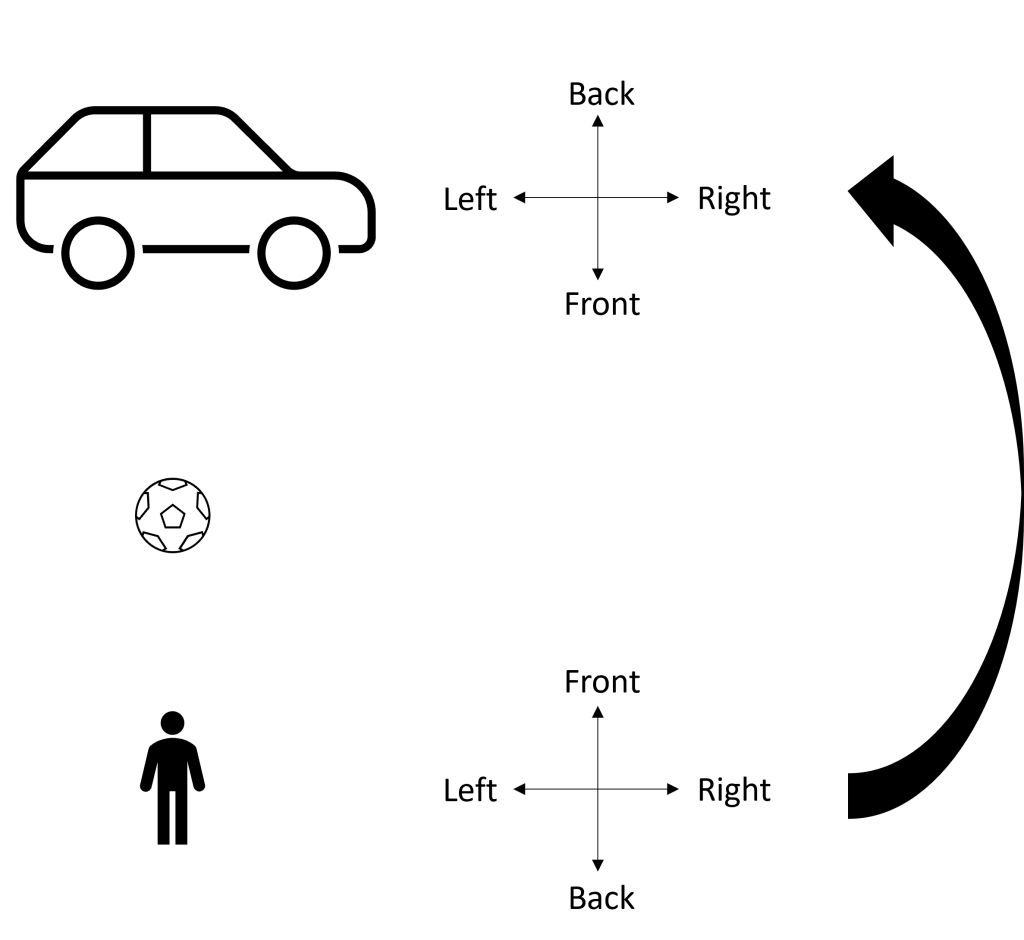
Note that since “in front of” in English can have either an intrinsic or relative interpretation, it is ambiguous: if the ball is in front of the car then either it is between the speaker and the car, or it is located such that if the car travelled forwards it would pass over or just miss the ball.
While reflection is a common way to project the speaker’s own coordinate system onto other grounds, it is not the only way to do so. Hausa, for example, seems to prefer translation alone, so “in front of” would normally mean on the opposite side of the ground to the speaker, and “behind” would mean between the ground and the speaker. In this system, it is as if all grounds have their back to the speaker, whereas in the English system grounds face the speaker.
Weak Linguistic Relativity
The relative frame was previously thought to be universal, but part of Levinson’s point is that it is not. There are languages and cultures where the relative frame of reference is at best weak. With the exception of a very small number of debatable examples, it is probably true that all languages use the intrinsic frame of reference to some extent: apart from anything else, it is natural for people to locate things in relation to themselves by reference to their sides and body parts. But the projection of your own coordinate system onto other ground objects is not as universal.
Given that the intrinsic frame is universal, that leaves us with the following attested types in normal everyday speech:
| Type | Language(s) |
| (Almost) intrinsic only | Mopan (Mayan) |
| Absolute + weak intrinsic | Guugu Yimithirr |
| Intrinsic + Relative | Dutch, Japanese, English |
| Intrinsic + Absolute | Tzeltal (Mayan), Hai//om (Khoisan) |
| Intrinsic + Relative + Absolute | Yucatec (Mayan), Kgalagadi (Bantu) |
And one point Levinson makes is that this does affect what you pay attention to. If you’re a speaker of a language with the absolute frame as the dominant strategy, then not only do you need to be able to track those bearings in the present, when talking about past events you’re expected to get absolute directions right in spatial descriptions. Which means that you must remember that information, because it may not be reconstructable later otherwise. And speakers of such languages do so.
The dominant frame also affects spatial reasoning. One test which Levinson did was to place speakers of different languages between two tables, one with a arrow pointing north and right, and a second with two arrows, one pointing north and left and the other pointing south and right. The speaker was shown the first table and then rotated to face the second table and asked to pick the “same” arrow. Speakers of absolute frame languages mostly picked the arrow with the same cardinal direction (north), whereas speakers of relative frame languages mostly picked the arrow with the same relative direction (right).
This doesn’t mean that any person who did Levinson’s tests was incapable of spatial reasoning. But it does mean that the conventions within their language community affected what they paid attention to by default.
